
James Webb Space Telescope
Topics
Lagrange Points
James Webb Space Telescope will be placed at the Lagrange point L2 and so it will be at a stable position on the line Sun - Earth. It will rotate synchronously with Earth around Sun.
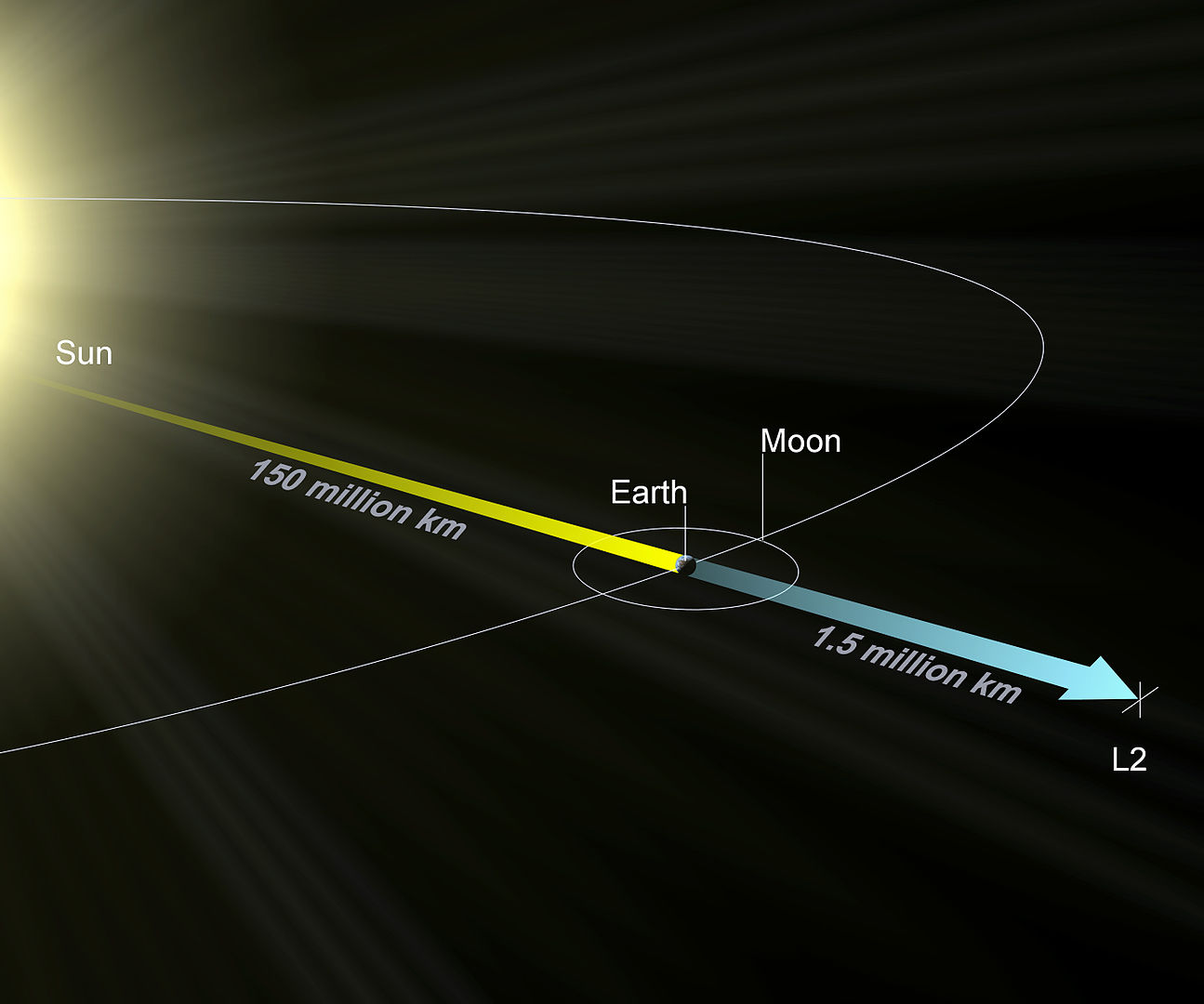
There are 5 Lagrange points L1, ... L5 in the Sun–Earth system that rotate synchronously with Earth around Sun, i.e. they appear at fixed positions with respect to Earth.
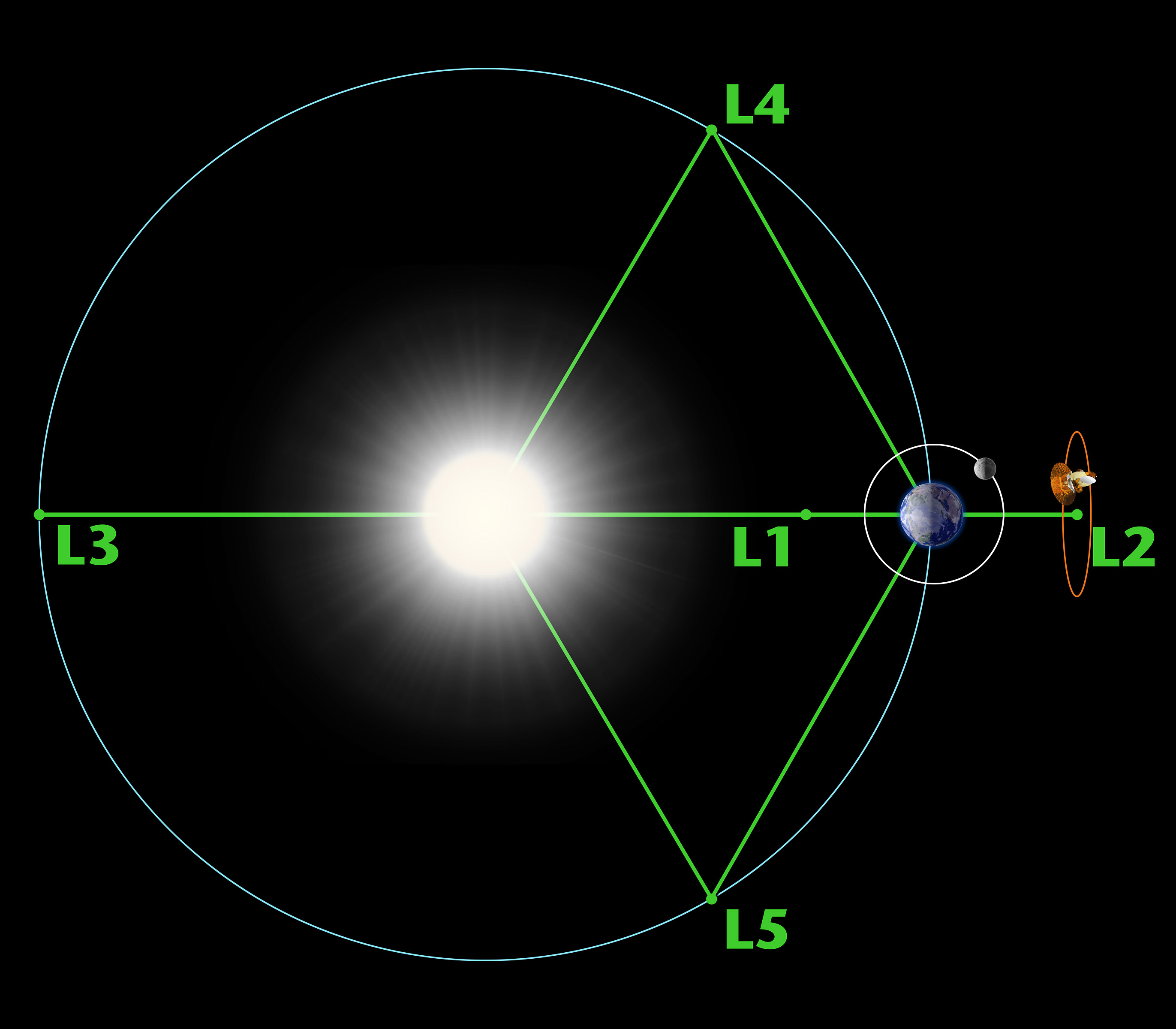
The Lagrange points L1, L2, L3 lie on a line through Sun and Earth. They were discovered already by Euler (1707 - 1783). L1 is on the "dayside" between Sun and Earth, L2 is on the "nightside" away from Sun and L3 is behind the Sun and not visible from Earth.
Lagrange (1736 - 1813) discovered the points L4 and L5 that are on the vertices of two equilateral triangles Sun-Earth-L4 and Sun - L5 - Earth. The side length of these triangles equals the distance from Sun to Earth.
Euler and Lagrange discovered these equilibrium points when studying the so-called three-body problem. In this article I will explain Lagrange points and derive their positions in a simplified setting.
Circular Earth orbit
We know since Kepler (1571 - 1630) that planets orbit the Sun on ellipses with the Sun at one of the two foci. Since Newton (1726 - 1727) we know how to compute these orbits. To simplify the mathematics I will assume that the orbit of Earth is circular with the radius $R$. In fact, this is a very good approximation because the distance from the Sun varies only from $147.1 \times 10^6$km to $152.1 \times 10^6$km.
The gravitational attraction between Sun of mass $M_1$ and Earth of mass $M_2$ is: $$ F_G = G \frac{M_1 M_2}{R^2} \tag{1} $$ where $G$ is the gravitational constant. This force provides the centripetal force on the Earth $$ F = M_2 \omega^2 R = M_2 \left( \frac{2 \pi}{T} \right) ^2 R \tag{2} $$ that forces the Earth into the circular orbit with the period $T = 365.26$ days and the angular velocity $\omega = 2 \pi / T$. Setting the forces (1) and (2) equal we notice that the mass $M_2$ cancels out and we get $$ \omega^2 R^3 = G M_1 = \text{const} \tag{3} $$ This relation is valid for all planets and is in fact the Kepler's third law.
The following table summarizes the numerical values of important data for a quick reference (SI units):
| Gravitational constant G | 6.67408 × 10-11 |
| Sun's mass M1 | 1.98847 × 1030 |
| Sun's radius | 6.96342 × 108 |
| Sun/Earth barycenter | 4.49 × 105 |
| Earth's mass M2 | 5.9722 × 1024 |
| Earth's orbit Ravg | 149.6 × 109 |
| Earth's orbit Rmin "perihelion / periapsis" | 147.1 × 109 |
| Earth's orbit Rmax "apohelion / apoapsis" | 152.1 × 109 |
| Earth's period T | 3.1558 × 107 sec (=365.26 days) |
Lagrange point L1
Suppose that a satellite with the mass $m$ is at the point L1 at the distance $r$ from the Earth. The force acting on the satelite is the attraction of the Sun $F_1$ minus the attraction of the Earth $F_2$: $$\begin{align} F_1 & = \frac{G M_1 m}{(R - r)^2} \\ \tag{4} F_2 & = \frac{G M_2 m}{r^2} \end{align}$$ The force $F_1 - F_2$ causes the circular motion of the satellite around the Sun that should have the same angular velocity $\omega$ (i.e. the same orbital period $T$) as the Earth. $$ \frac{G M_1 m}{(R - r)^2} - \frac{G M_2 m}{r^2} = m \omega^2 (R - r) = m \frac{G M_1}{R^3} (R - r) \tag{5} $$ The last equallity in eq. (5) was obtained by using the Kepler Law (3).
We devide this equation by the right hand side and introduce the relative distance $\rho = r/R$ of L2 from Earth to L2 and get: $$ \frac{1}{(1 - \rho)^3} - \frac{M_2 / M_1}{\rho^2 (1- \rho)} = 1 \tag{6} $$
We could now convert this equation to a polynomial equation of fifth degree. The resulting quintic was already known to Euler. Unfortunately, the quintic cannot be solved analytically. However, there is a nice and simple approximation to the solution starting with Eq. (6). Since $\rho \ll 1$ we can approximate the first fraction by the first terms of the binomial expansion: $$ \frac{1}{(1 - \rho)^3} \approx 1 + 3 \rho \tag{7} $$ In the second term we use: $$ \rho^2 (1- \rho) \approx \rho^2 \tag{8} $$ Substituting these approximations in Eq. (6) we get the solution: $$ \rho = \frac{r}{R} = \sqrt[3]{\frac{M_2}{3 M_1} } \tag{9} $$ For the Sun-Earth system we obtain for the distance of L2 from Earth: $$ r = 0.01 R = 1.5 \times 10^6 km \tag{10} $$
Lagrange point L2
A satellite at the Lagrange point L2 at the distance $r$ from Earth experiences the attraction forces of Sun $F_1$ and Earth $F_2$ pulling in the same direction towards Sun. The total force is $F_1 + F_2$ and it equals the centripetal force. Similarly to Eq. (5) we obtain: $$ \frac{G M_1 m}{(R + r)^2} + \frac{G M_2 m}{r^2} = \frac{G M_1 m (R + r)}{R^3} \tag{11} $$ The solution of this equation is analoguous to the previous procedure and yields again: $$ \rho = \frac{r}{R} = \sqrt[3]{\frac{M_2}{3 M_1} } = 0.01 \tag{12} $$
Lagrange point L3
A satellite at the Lagrange point L3 at the distance $r$ from Sun experiences the attraction forces of Sun $F1$ and Earth $F2$ pulling in the same direction towards Sun: $$\begin{align} F_1 & = \frac{G M_1 m}{r^2} \\ \tag{13} F_2 & = \frac{G M_2 m}{(R + r)^2} \end{align}$$ The total force is $F_1 + F_2$ and it equals the centripetal force. Similarly to Eq. (11) we obtain: $$ \frac{G M_1 m}{r^2} + \frac{G M_2 m}{(R + r)^2} = \frac{G M_1 m r}{R^3} \tag{14} $$ The force $F_2$ of the Earth is much smaller than the force $F_1$ of the Sun at the side behind the Sun. In fact, at $r = R$ we have $F_2 / F_1 = 7.5 \times 10^{-7}$. Hence, we can ignore the force $F_2$ of the Earth in Eq. (14) and obtain the approximation: $$ r \approx R \approx 1.5 × 10^6 km \tag{15} $$
For completeness, I include a better approximation (see e.g. D. Westra): $$ r \approx R - 262 km \tag{16} $$ Wee see that this 262 km cannot be visible in Eq. (15).
Lagrange points L4 and L5
Using the current approximations we cannot justify the Lagrange points L4 and L5 that lie in the same orbit as the Earth. When we ignore the gravitation force of the Earth then all mass points in the Earth orbit are stable because they have the same period $T$ of revolution as the Earth according the the third Kepler law (3). When we include the gravitation force of the Earth then the resulting force as the vectorial sum of Sun's and Earth's forces cannot point to the Sun's center because the Sun's force alone points there. So a satellite at L4 or L5 could not rotate around the center of the Sun.
The problem with our current approximation is that we assumed a fixed Sun's position. In reality, Sun and Earth build a so called two body problem: Sun and Earth both move around the common center of mass (barycenter).
This figure introduces a coordinate system with the origin at the barycenter C. Since Earth and Sun move in a fixed plane we will restrict our coordinate system to the two dimensions of this plane. The barycenter is the center of mass of the Sun and the Earth and is given by $$ M_1 \mathbf r_1 + M_2 \mathbf r_2 = \mathbf 0 \tag{16} $$ where $\mathbf r_1 = (-r_1, 0) $ and $\mathbf r_2 = (r_2, 0)$ are the vectors specifying the position of the Sun and the Earth, respectively. Refering to the figure above, the Sun excerts the force $F_2$ in the x-direction on the Earth $$ F_2 = G \frac{M_1 M_2}{R^2} \tag{17} $$ where $R = r1 + r2$ is the distance between the Sun and the Earth. This force causes the circular rotation of the Earth around the barycenter C that remains at rest. The angular velocity is given by: $$ G \frac{M_1 M_2}{R^2} = M_2 \omega^2 r_2 \tag{18} $$ Sun and Earth remain on the line going through C such that Sun rotates with the same angular velocity as Earth. The force of Earth on Sun has the same magnitute as $F_2$ in (17) so we get an analoguous equation: $$ G \frac{M_1 M_2}{R^2} = M_1 \omega^2 r_1 \tag{19} $$ We add the equations (18) and (19) after canceling the masses $M_2$ and $M_1$ and get $$ R^3 \omega^2 = G (M_1 + M_2) \tag{20} $$ This is a modified Kepler's Third Law for the circular rotation around the pericenter.
Now consider the Lagrange point L4 that is at the third vertex of the equilateral triangle Sun-Earth-L4, i.e. its distance from Sun and Earth is $R = r_1 + r_2$.
We will show that a satellite with a mass $m$ will remain at this point and rotate with the angular velocity $\omega$ around the barycenter C. This will be the case when the resulting force on $m$ will point toward the barycenter and have the magnitude $m \omega^2 r$, where $r$ is the distance between C and L4.
Referring to the figure above, the respective forces $\mathbf f_1$ of Sun and $\mathbf f_2$ of Earth on the mass $m$ at L4 are: $$\begin{align} \mathbf f_1 & = - G \frac{M_1 m}{R^3} (\mathbf r - \mathbf r_1) \tag{21} \\ \mathbf f_2 & = - G \frac{M_2 m}{R^3} (\mathbf r - \mathbf r_2) \end{align}$$ The resulting force is $$ \mathbf f = \mathbf f_1 + \mathbf f_2 = - \frac{G m}{R^3} (M_1 + M_2) \mathbf r + \frac{G m}{R^3} (M_1 \mathbf r_1 + M_2 \mathbf r_2) \tag{22} $$ The second term in (22) is zero because of the equation of the barycenter (16). We insert the equality (20) into the first term and get $$ \mathbf f = - m \omega^2 \mathbf r \tag{23} $$ The resulting force $\mathbf f$ points to the barycenter and hence is a centripetal force on $m$ causing it to rotate with the angular velocity $\omega$ - quod erat demonstrandum.
The distance of the barycenter to the Sun's center is only about 5 × 102 km which is very small compared to Sun's radius of about 7 × 105 km. But this small distance has the same order of magnitude as the deviation of the Langrange point L3 from the Earth orbit. It is also sufficient to explain the Langrange points L4 and L5. The Langrange point L5 is symmetrical to L4, so its stability is obvious.
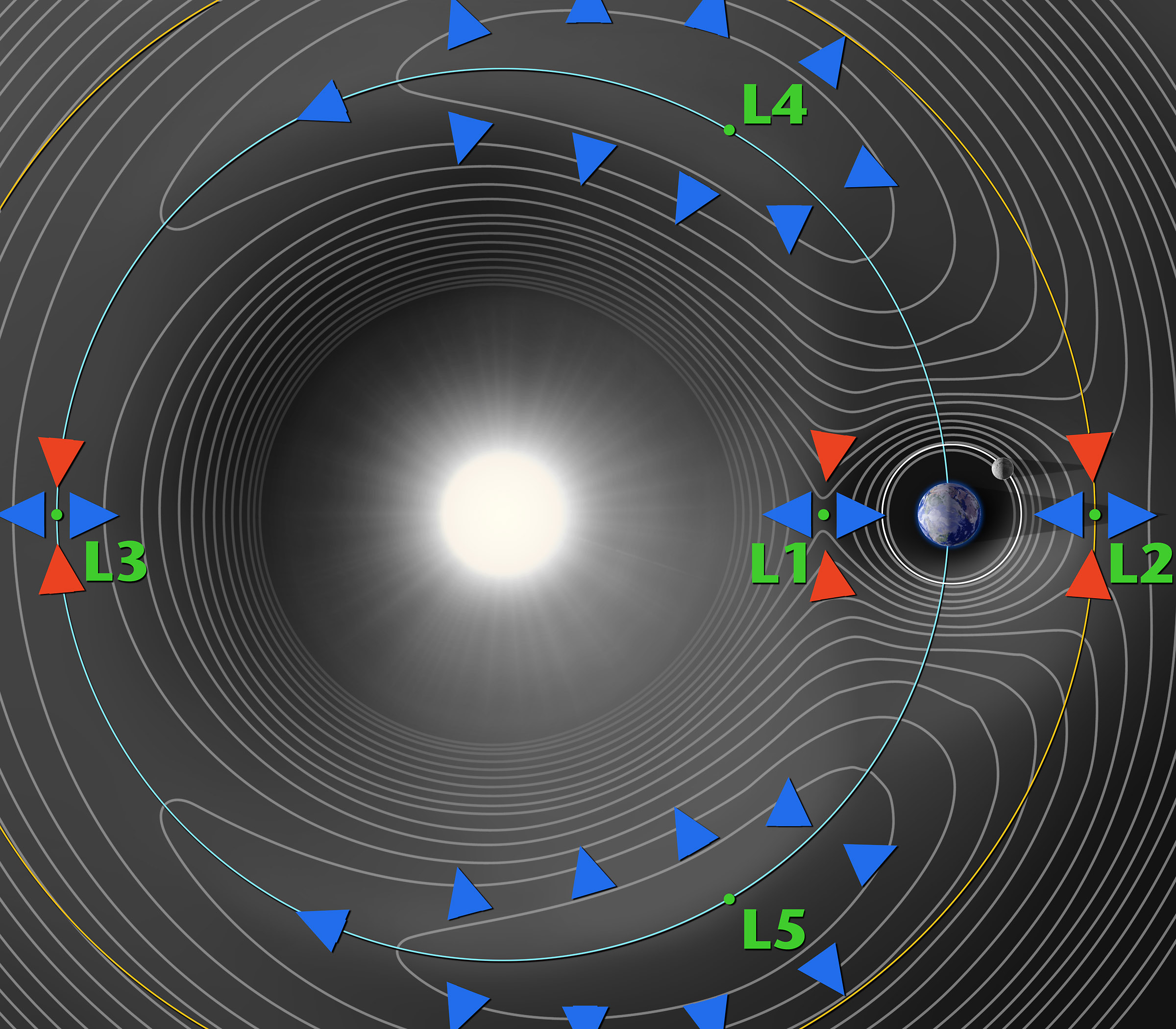
Stability of Lagrange points
Links
- WEBB Space Telescope (NASA) Here are further links
- What is a Lagrange Point? (NASA)
- Webb Orbit (NASA) with nice animation
- Lagrange point (Wikipedia)
- The Five Points of Lagrange - scientific description without mathematics by Neil deGrasse Tyson
- Lagrangian Points - nice and simple mathematical derivation by Dennis Westra
- The Lagrange Points - the standard mathematical derivation by Neil Cornish
- The Three-Body Problem by Juhan Frank
- The Three-Body Problem by H. Hergert
- The Restricted Three-Body Problem by S. Widnall